- Terminale STI
- bts
- scénario, séquence
- production d'élève
- démarche pédagogique
- enseignant
- classe
RobotBlocs
Projet pluritechnique SIN/ITEC inventé au lycée Livet dont l'objectif est de créer un système analogue à celui des blocs qu'on ajoute pour faire des mots, mais transposé au pilotage à distance d'un robot traceur. A terme le système doit être fabriquable en collège et lycée, et utilisable par des élèves dès le CE1 pour la formation à l'algorithmie (notion de séquence).
Introduction
La problématique est la suivante : "concevoir un système permettant à des enfants âgés de 6 ans ou plus, sachant lire ou pas, avec des difficultés motrices ou pas, d'apprendre les bases de la programmation et de l’algorithmique".
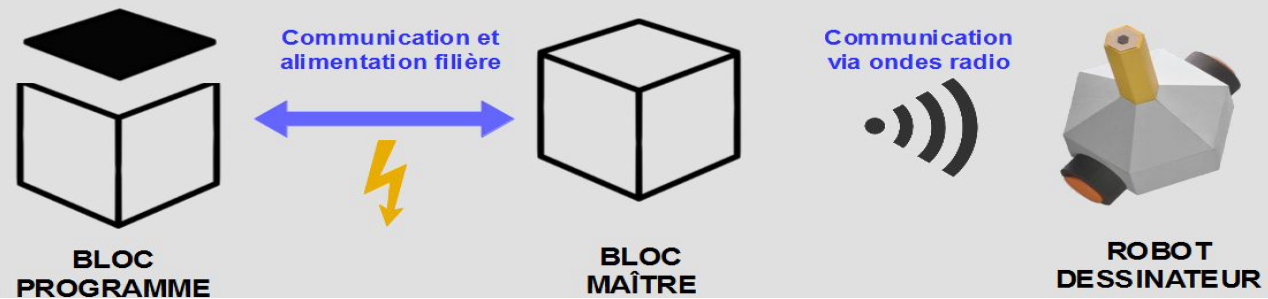
A la suite de la lecture du cahier des charges fonctionnels, il faut concevoir un système composé de 3 sous-systèmes :
- des blocs programmes qui auront une fonction, liée aux mouvements du robot, définie par un couvercle amovible ainsi qu'une capacité à s'emboîter entre eux afin de former une chaîne pour transmettre l'information.
- un bloc maître qui transmet les informations des blocs programmes à un robot dessinateur.
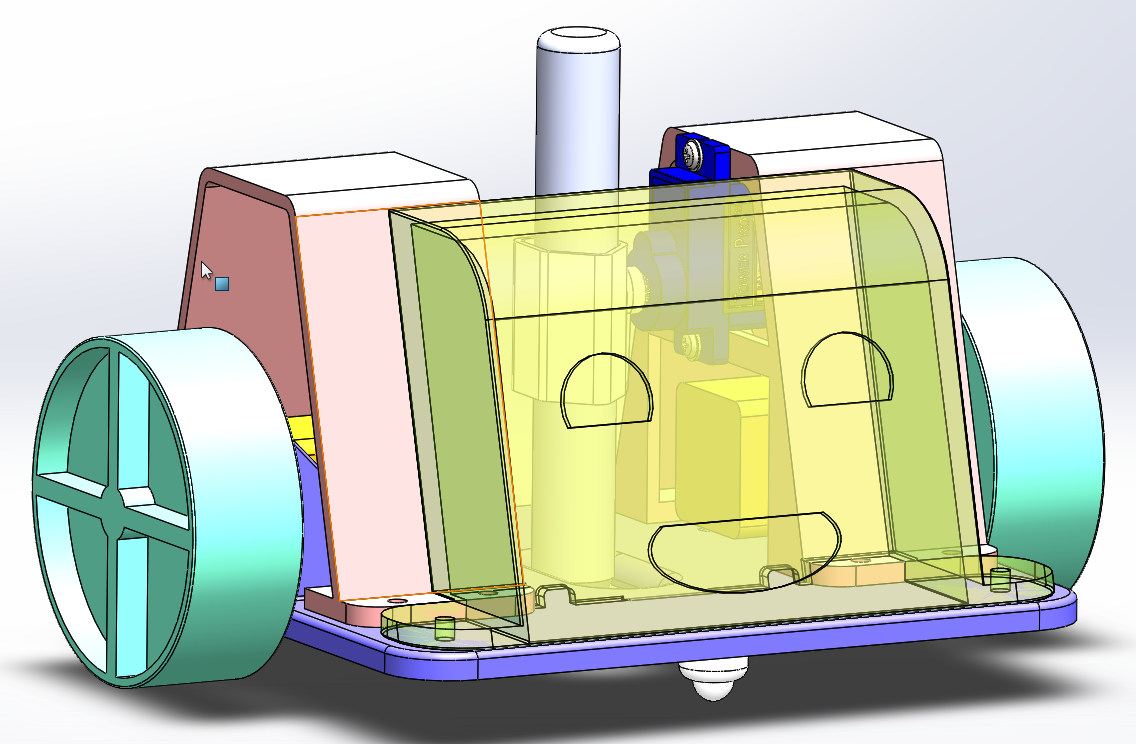
- un robot dessinateur motorisé autonome en énergie qui possédera une partie mobile pour déplacer un crayon, d'un diamètre de 8mm à 15mm, afin de tracer des formes sur papier. Il exécutera les commandes des blocs programmes envoyées via le bloc maître.
En effet les enfants jouent naturellement avec leurs mains et apprennent avec dès leurs premières années, construisant toute sorte de choses qui peuvent les amuser mais aussi en faisant ces choses ensemble. Un des avantages de la programmation tangible est qu'il rend physique l'idée de la séquence programmée, afin que les enfants puissent jouer avec, les manipuler et refaire autant que voulu avant de le téléverser. La tranche d'âge visée est celle d'enfants entre 6 et 7 ans.
Déroulé du projet
Un cahier des charges commun, sous forme de diagrammes SysML, a été donné au groupe d'élèves de Terminale STI2D en spécialité SIN ainsi qu'au groupe en ITEC. A partir de ces documents ils ont donc commencé leur analyse préliminaire.Pour valider cette démarche de créativité, ils sont allés confronter leurs idées à une classe de CE1 et échangé avec les enfants afin de guider leur créativité.
Répartition des tâches
L'équipe d'élèves de STI2D SIN doit préparer :
- comment les informations sont relayées d'un bloc à l'autre ;
- comment les informations sont relayées d'un bloc au bloc maître ;
- comment les informations sont relayées du bloc maître au robot ;
- les protocoles de communication ;
- les déplacements possibles du robot traceur sous forme de procédures exécutées ;
- le choix de microcontrôleurs ;
- la programmation des microcontrôleurs ;
- la fabrication des cartes électroniques.
- comment les informations sont relayées du bloc maître au robot ;
- les protocoles de communication ;
- les déplacements possibles du robot traceur sous forme de procédures exécutées ;
- le choix de microcontrôleurs ;
- la programmation des microcontrôleurs ;
- la fabrication des cartes électroniques.
L'équipe d'élèves de STI2D ITEC doit préparer :
- la forme des blocs en regard du public (voir diagramme des exigences) ;
- la forme du robot en regard des fonctions à exécuter (voir diagramme des exigences) ;
- les solutions techniques pour réaliser les fonctions techniques du robot ;
- imaginer une solution pour que les blocs (escalve + maître) s'assemblent facilement, sans mode d'emploi ;
- la conception des éléments (blocs esclave et maître + robot) ;
- les simulations indispensables à une éco-conception (choix des matériaux grâce à CES Edupack, vérifiation de la résistance RdM, analyse des possibilités d'injection pour production en grande série grâce à la rhéologie).
- la forme du robot en regard des fonctions à exécuter (voir diagramme des exigences) ;
- les solutions techniques pour réaliser les fonctions techniques du robot ;
- imaginer une solution pour que les blocs (escalve + maître) s'assemblent facilement, sans mode d'emploi ;
- la conception des éléments (blocs esclave et maître + robot) ;
- les simulations indispensables à une éco-conception (choix des matériaux grâce à CES Edupack, vérifiation de la résistance RdM, analyse des possibilités d'injection pour production en grande série grâce à la rhéologie).
Tous les documents produits par les élèves sont accessibles sur le dépôt, autant les conceptions, créations, fichiers de fabrication ainsi que les dossiers techniques et les diaporamas produits.
Résultats
Ce projet est sans cesse relancé pour faire entrer les élèves dans une logique de conception liée au développement durable, principalement le pilier social mais aussi économique afin que le résultat soit produisible dans un collège ou un fablab, avec une technologie accessible/reproductible.Toutefois, ce projet n'a pas encore abouti à un produit fini par manque de temps sur le projet, bien que des idées aient émergé et puissent être validées :
auteurs :
Sébastien CANET
Mots clés :

Information(s) pédagogique(s)
Niveau :
Terminale STI, bts
Type pédagogique :
scénario, séquence, production d'élève, démarche pédagogique
Public visé :
enseignant
Contexte d'usage :
classe
Document(s) complémentaire(s)
-
Tout le dossier de documents à télécharger
ressourceLes fichiers sont déposés sur Github pour maintenir les versions car le projet est vivant, relancé régulièrement et mis à disposition pour être enrichi.
lien de docs Accéder à la ressource